A First Look at Verse
This is an introduction to creating scenarios in Verse. An interactive tutorial with more details are in this Jupyter notebook.
A Verse scenario is defined by a map, a set of agents, and optionally a sensor. We will create a scenario with a drone following a straight path that dodges obstacles by moving up or down.
Import a map
A map specifies the tracks or paths that the agents is allowed to follow. Our map will have two kinds of tracks:
1. T0 is an x-axis aligned track
2. TAvoidUp is a upward track for avoiding obstacles on the x-axis.
T0 and TAvoidUp are called the track modes in Verse. To create new maps of your own, see Map. For now, import a pre-defined map with:
from tutorial_map import M3
map1 = M3()
Note
Set
PYTHONPATHif necessary to include the Verse directory. For example:export PYTHONPATH=../../Verse-library
Create an agent
An agent is defined by:
Set of tactical modes which define the kinds of behavior the agent wants to perform. Tactical and track modes together define the discrete modes of the agent.
Set of state variables that define the continuous state of the agent in the map or the physical world, as well as the discrete modes.
Decision logic which define mode changes.
Flow function which defines continuous variable changes.
In our scenario, the tactical modes will be Cruise and Up. The decision logic also need to know the available track modes from the map. The tactical modes and track modes are provided as Enums to Verse.
from enum import Enum, auto
class CraftMode(Enum):
Cruise = auto()
Up = auto()
class TrackMode(Enum):
T0 = auto()
TAvoidUp = auto()
Define the state variables in the State class. You can name your variables however you like. Variables names ending with _mode will be identified as discrete variables. Here craft_mode and track_mode are the discrete variables and the types are necessary to associate them with the tactical and track modes.
class State:
x: float
y: float
z: float
vx: float
vy: float
vz: float
craft_mode: CraftMode
track_mode: TrackMode
The decision logic (DL) is a function that takes as input the agent’s current state (and optionally the observable states of the other agents) and returns the new state after a transition. That is, it updates the tactical mode of the agent. The drone starts in Cruise mode and the obstacle is at 20 meters. When the x position of the drone is close 20, the decision logic switches to Up.
import copy
def decisionLogic(ego: State, track_map):
next = copy.deepcopy(ego)
if ego.craft_mode == CraftMode.Normal:
if ego.x > 20:
next.craft_mode = CraftMode.Up
next.track_mode = track_map.map2track(ego.track_mode, ego.craft_mode, CraftMode.Up)
return next
What’s track_map.map2track, you might wonder. Recall, tracks are defined by the map, and when the agent decides to change its behavior, say to move up, then the actual path it can follow is given by the map and this is computed using the track_map.map2track.
Note
See Verse parser documentation for allowed syntax in DL. Verse interprets
if-then-elseconditions nondeterministically. That is, if multipleifconditions are satisfied then all the corresponding transitions are simulated. Save DL code in a file, saydl_sec1.py.
Create a scenario
In a separate scenario file, write the the following to instantiate a drone agent. DroneAgent is a Verse class derived from BasicAgent. It defines the continuous dynamics of a quadrotor in 3D-space controller by a neural network (NN). The parameters of this NN are passed to the model using the last two arguments.
from verse.scenario import Scenario
from tutorial_agent import DroneAgent
drone1 = DroneAgent("drone1", file_name="dl_sec1.py",
t_v_pair=(1, 1), box_side=[0.4] * 3)
drone1.set_initial([[0, -0.5, -0.5, 0, 0, 0], [1, 0.5, 0.5, 0, 0, 0]],
(CraftMode.Cruise, TrackMode.T0))
scenario = Scenario()
scenario.add_agent(drone1)
scenario.set_map(map1)
This sets the initial continuous state of the agent in a rectangle defined by lower-left and the upper-right corners of a 6-dimensional cube, and the discrete state (mode) to be constants. It create an black scenario and then adds the drone1 agent to it and the sets the map. Since we only have one agent in the scenario, we don’t need to specify a sensor. This completes the definition of the scenario. When executed, Verse will internally construct a hybrid automaton with the state space defined by States, transitions defined by DL and trajectories defined by the DroneAgent.
Run scenario
Compute simulation traces or reachable states for the scenario
traces_simu = scenario.simulate(60, 0.2)
traces_veri = scenario.verify(60, 0.2)
The scenario.simulate(T,d) function computes the simulation tree, with all possible nondeterministic transitions, of maximum duration T with a sampling period of d. The scenario.verify(T,d) function computes the reachability tree up to time T with a sampling period of d.
The computed results can be visualized in a number of different ways using Verse’s plotting function.
from verse.plotter.plotter3D import *
import pyvista as pv
import warnings
warnings.filterwarnings("ignore")
from verse.plotter.plotter2D import *
import plotly.graph_objects as go
fig = go.Figure()
fig = reachtube_tree(traces_veri, None, fig, 1, 3)
fig.show()
fig = pv.Plotter()
fig = plot3dMap(map1, ax=fig)
fig = plot3dReachtube(traces_veri, "drone1", 1, 2, 3, color="r", ax=fig)
fig.set_background("#e0e0e0")
fig.show()
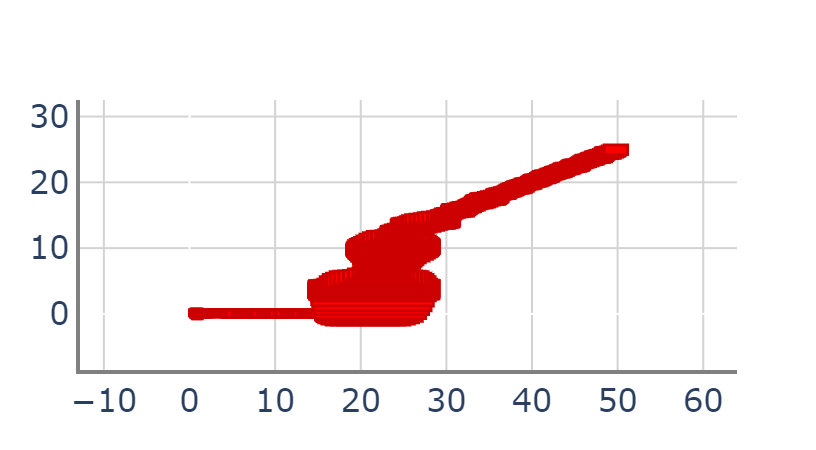
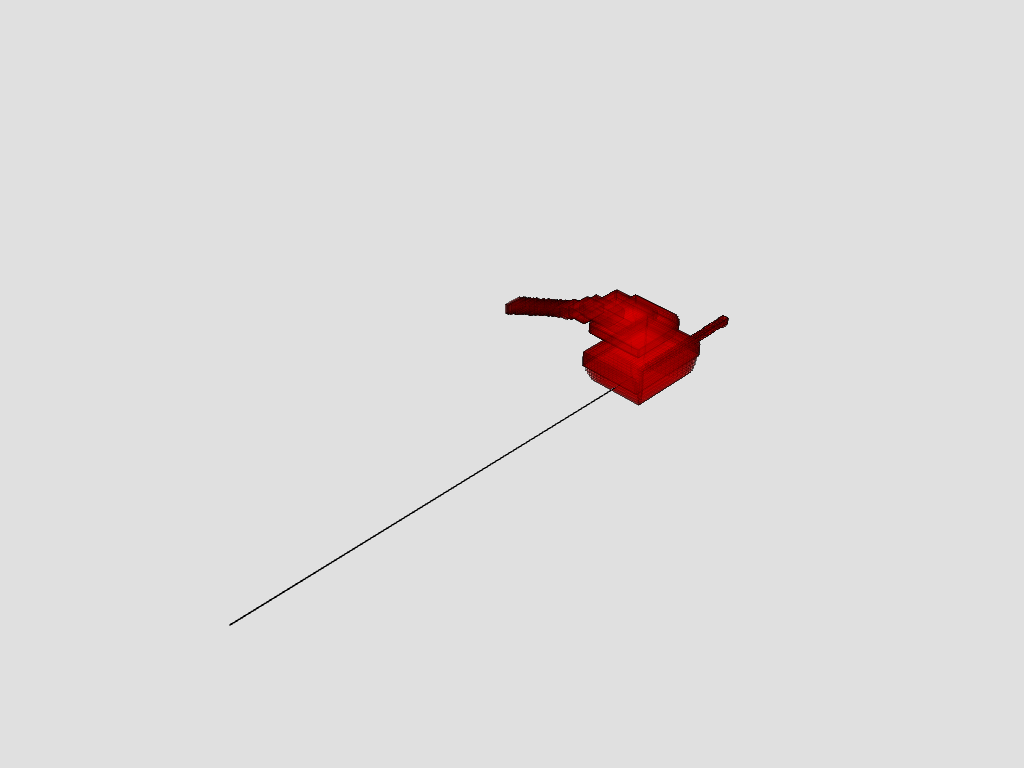
The visualized reachable set result looks like this:
z vs t plot |
x,y,z plot |
|---|---|
|
|